Определение и свойства систем
Систему можно определить как устройство (объект), в котором определены связи (уравнения) между входными и выходными сигналами в соответствии с её структурой и параметрами. Общее обозначение системы

Системы
могут быть самыми разнообразными по физической природе: механическими,
электрическими, электронными, оптическими и др. Примеры систем: электронная
аудиосистема, кардиограф, аудиоплеер, телевизор, оптико – электронная
фотокамера и др.
Определение выходного сигнала y(t) по
входному сигналу x(t) и
оператору S{x(t)} является задачей анализа
системы. Определение оператора S{} по заданному
выходу y(t) и входу x(t) называется
задачей синтеза системы. Наконец,
определение входа x(t) по выходному сигналу и оператору системы S называют задачей восстановления или идентификации.
Это задача, обратная задаче анализа.
Предварительно сведения по определению и свойствам систем рассмотрены в лекции № 2. В этом разделе лекции они частично повторяются.
Система является непрерывной, или аналоговой, если её сигналы - функции непрерывного аргумента. Большинство сигналов реального мира – непрерывные. В дискретных (цифровых) системах входной и выходной сигналы – дискретные по аргументу.
Система называется линейной, если она удовлетворяет принципу суперпозиции. Согласно этому принципу, если входному
сигналу xk (t) соответствует выходной сигнал yk (t), то линейной комбинации входных сигналов должна
соответствовать та же линейная комбинация выходных сигналов, т.е. для линейных
систем, если
![]() , то
, то ![]() .
.
Свойство линейности – важнейшее для анализа и синтеза систем. Многие, но далеко не все реальные системы – линейные. К нелинейным устройствам относятся, например, модуляторы, детекторы, умножители, дешифраторы и многие другие.
Линейная система будет стационарной, или инвариантной во времени (англ. LTI systems, Linear Time Invariant System), если при сдвиге входного сигнала на величину τ
происходит такой же сдвиг выходного сигнала, т.е. ![]() . У такой системы её параметры и характеристики не изменяются
на рассматриваемом интервале времени. В данном курсе рассматриваются только
стационарные системы.
. У такой системы её параметры и характеристики не изменяются
на рассматриваемом интервале времени. В данном курсе рассматриваются только
стационарные системы.
Система является каузальной или физически осуществимой, если её выходной сигнал зависит только от настоящего и прошлых значений входного сигнала, но не зависит от будущих значений. Реальные системы являются каузальными. Системы, у которых аргументы – пространственные переменные могут быть некаузальными.
Система
будет устойчивой, если ограниченному
входному сигналу соответствует ограниченный выходной сигнал, т.е. если ![]() , то для устойчивой системы
, то для устойчивой системы
![]() .
.
Широкий класс линейных непрерывных стационарных систем (ЛНСС) описывается обыкновенными линейными дифференциальными уравнениями с постоянными коэффициентами (ОЛДУПК).
Общий вид такого уравнения
![]()
с заданными начальными условиями ![]()
Или в более краткой форме
![]()
Дифференциальное уравнение дает связь выхода y(t) и входа системы x(t) в дифференциальной форме. При этом:
 - коэффициенты
системы,
- коэффициенты
системы,- наибольшее значение из n и m называется порядком системы.
Во многих случаях, но не всегда, начальные условия нулевые
![]() ,
,
т.е. до начала отсчета система находится в состоянии покоя.
Пример. Активный фильтр нижних частот (ФНЧ) со схемой
Данная схема является фильтром нижних частот (ФНЧ), т.к. низкочастотные гармоники лучше проходят на выход, чем высокочастотные.
Считая операционный усилитель идеальным с бесконечно большим коэффициентом усиления и бесконечно большим входным сопротивлением, запишем выражения для токов ветвей
![]() .
.
По первому закону Кирхгофа
![]() .
.
Подставляя выражения для токов, получаем дифференциальное уравнение выход –
вход для данного фильтра
![]() или
или ![]() .
.
Это уравнение и система (фильтр) первого
порядка: ![]() . Коэффициенты
уравнения
. Коэффициенты
уравнения ![]() связаны с параметрами
фильтра
связаны с параметрами
фильтра ![]() .
.
Если ![]() , то получаем уравнение
, то получаем уравнение
![]() или
или ![]() ,
,
т.е. без R2 этот фильтр становится интегратором. Другие примеры: см. «Задачи 7».
Решение дифференциального уравнения
системы
Решение дифференциального уравнения (ДУ) системы
дает выход системы y(t) для заданного входа
x(t). Для решения такого уравнения кроме задания x(t) и производных x(t)
необходимы ещё n начальных условий выходной переменной y(t) и её
производных, т.е. нужны ![]() .
.
Из теории дифференциальных уравнений следует, что общее решение дифференциального уравнения это сумма решения линейного однородного уравнения yс(t) с правой частью, равной нулю, и частного решения yp(t) неоднородного уравнения для определенного x(t):
![]() .
.
Решение однородного уравнения (с нулевой правой частью)
![]() имеет вид
имеет вид
![]() ,
,
где ![]() - корни
характеристического многочлена
уравнения
- корни
характеристического многочлена
уравнения ![]() .
.
Корни![]() зависят от коэффициентов левой части уравнения a0, a1, …,an.
зависят от коэффициентов левой части уравнения a0, a1, …,an.
Члены ![]() называются собственными колебаниями системы. При этом постоянные A1, A2,…,An определяются по заданным начальным условиям. Решение
называются собственными колебаниями системы. При этом постоянные A1, A2,…,An определяются по заданным начальным условиям. Решение ![]() характеризует
поведение (отклик, реакцию) системы при
заданных начальных условиях
характеризует
поведение (отклик, реакцию) системы при
заданных начальных условиях ![]() и отсутствии входного сигнала (англ. zero – input response).
и отсутствии входного сигнала (англ. zero – input response).
Частное решение уравнения yp(t) характеризует выходной сигнал (реакцию) системы с нулевыми начальными условиями при заданном входном сигнале x(t). Оно называется также вынужденным откликом системы (zero- state response).
Частное решение определяется
достаточно просто, когда правая часть (входной сигнал системы) имеет
специальный вид. Например, если ![]() , где
, где ![]() - многочлен от t степени k, то частное решение имеет
вид
- многочлен от t степени k, то частное решение имеет
вид ![]() . При этом
. При этом ![]() - многочлен той же степени k с неопределенными коэффициентами. Т.е. частное решение
имеет тот же вид, что и правая часть x(t). Примеры
решения уравнений см. в курсах
математического анализа, файле «Задачи7»
и в разделе 6 «Методических указаний к
решению задач и упражнений».
- многочлен той же степени k с неопределенными коэффициентами. Т.е. частное решение
имеет тот же вид, что и правая часть x(t). Примеры
решения уравнений см. в курсах
математического анализа, файле «Задачи7»
и в разделе 6 «Методических указаний к
решению задач и упражнений».
Если входной сигнал имеет вид ![]() или
или ![]() , то частное решение ищется в виде
, то частное решение ищется в виде ![]() .
.
Поэтому для ![]() частное решение имеет
вид
частное решение имеет
вид ![]() . Подстановка x(t)
и yp(t) в ДУ
. Подстановка x(t)
и yp(t) в ДУ
![]() дает выражение
дает выражение
![]() , поскольку
, поскольку ![]() .
.
Делением на ![]() получаем
получаем ![]() . Функция
. Функция
называется передаточной функцией (системной
функцией) системы. Она характеризует
связь выходного и входного сигналов системы и является рациональной функцией,
т.е. отношением двух многочленов от комплексной переменной ![]() . При
. При ![]() получаем
получаем ![]() - частотную характеристику (ЧХ) системы. Здесь передаточная функция и частотные
характеристики введены чисто формально исходя из дифференциального
уравнения системы. В дальнейшем они будут рассматриваться подробно.
- частотную характеристику (ЧХ) системы. Здесь передаточная функция и частотные
характеристики введены чисто формально исходя из дифференциального
уравнения системы. В дальнейшем они будут рассматриваться подробно.
Пример.
Обратимся к дифференциальному уравнению рассмотренного выше фильтра
![]() или
или ![]() . Передаточная функция фильтра имеет вид
. Передаточная функция фильтра имеет вид ![]() . Частотная
характеристика
. Частотная
характеристика ![]() .
.
Положим ![]() . Пусть входной сигнал фильтра имеет вид
. Пусть входной сигнал фильтра имеет вид ![]() . Найдем решение
дифференциального уравнения фильтра
. Найдем решение
дифференциального уравнения фильтра
![]() для такого вида x(t). Общее решение
уравнения есть сумма решения
однородного уравнения (без правой части) и частного решения
для такого вида x(t). Общее решение
уравнения есть сумма решения
однородного уравнения (без правой части) и частного решения ![]() . Найдем вначале
решение однородного уравнения
. Найдем вначале
решение однородного уравнения ![]() или
или ![]() . Характеристический многочлен
. Характеристический многочлен ![]() , отсюда
, отсюда ![]() и решение однородного уравнения
и решение однородного уравнения ![]() .
.
Будем искать частное
решение в виде ![]() . Производная
. Производная ![]() . Подставим
. Подставим ![]() в уравнение, получим
в уравнение, получим ![]() Приравнивая коэффициенты при синусах и косинусах в левой и
правой части, получаем
Приравнивая коэффициенты при синусах и косинусах в левой и
правой части, получаем
![]() Решение этой
системы дает
Решение этой
системы дает ![]() . Общее решение
. Общее решение
![]() .
.
Значение константы А
можно найти по заданным
начальным условиям. Например,
если ![]() ,
,
то ![]() .Как видно даже
из
.Как видно даже
из
приведенного примера, решение
дифференциального уравнения –
громоздкая процедура.
Импульсная и переходная характеристики системы. Интеграл свертки.
Более удобным и простым способом анализа системы, чем определение решения ДУ, является использование её динамических характеристик: импульсной, частотной и передаточной (системной) функций.
Во временной области главной динамической характеристикой системы является её импульсная характеристика. Импульсная характеристика (impulse response) - это реакция (отклик) системы на входной сигнал в виде дельта – функции при нулевых начальных условиях. Другое название – весовая функция системы (см. также лекцию № 3).
Получим связь выходного и входного сигналов системы через импульсную характеристику (ИХ). В лекции №3 эта задача уже решалась. Здесь будет применен иной подход. Для нахождения импульсной характеристики аппроксимируем вход системы x(t) полиномом нулевого порядка, т.е. суммой импульсов вида x1(t) . Другими словами, применим кусочно – линейную аппроксимацию входного сигнала.

При такой аппроксимации
![]() .
.
Выразим x1(t) через единичный импульс (импульс с единичной
площадью) ![]() .
.
Площадь единичного импульса равна единице, поэтому
 ←сумма импульсов.
←сумма импульсов.
Это выражение - интегральная
сумма.
Его предел при ![]() дает
дает
 , поскольку
, поскольку ![]()
Для линейной системы в силу принципа суперпозиции

Здесь h(t) – импульсная характеристика.

Выражение называют непрерывной сверткой или интегралом свертки (наложения).
Для физически осуществимой (каузальной) системы ![]() при
при ![]() или
или ![]() , так как причина не может опережать следствие. Поэтому выход каузальных систем
, так как причина не может опережать следствие. Поэтому выход каузальных систем
![]() .
.
Реальные сигналы x(t) начинаются с момента t = 0, поэтому для каузальных сигналов и систем
 .
.
Это выражение свертки обычно и используется на практике.
Графический механизм вычисления свертки (подробности - в лекции №3):
- строятся графики x и h как функции τ,
- импульсная
характеристика h(τ) поворачивается
относительно оси ординат для получения h(-τ), - ИХ h(τ) сдвигается на t (аргумент y(t)) для получения h(t-τ),
- выполняется перемножение x(τ)h(t-τ),
- произведение
x(τ)h(t-τ)
интегрируется по τ для
вычисления
 ,
, - изменяется значение t и шаги 3 – 5 повторяются для нового значения t.
Примеры аналитического вычисления свертки приведены в файле «Задачи 5». В большинстве случаев вычисление свертки возможно только численными методами.
Численное (приближенное) вычисление свертки может быть произведено по выражению
![]() , Т – интервал дискретизации.
, Т – интервал дискретизации.
В Matlab для такого вычисления применяется функция conv(x,h).
![]() . Это
подробно рассматривается в лабораторной
работы № 5.
. Это
подробно рассматривается в лабораторной
работы № 5.
Для многих реальных систем ![]() , т.е. ИХ уменьшается
при возрастании аргумента t. Если
, т.е. ИХ уменьшается
при возрастании аргумента t. Если ![]() для
для ![]() , то говорят, что система имеет конечную память Т. При
этом
, то говорят, что система имеет конечную память Т. При
этом ![]() зависит от входа
зависит от входа ![]() только на интервале длиной Т.
только на интервале длиной Т.
Кроме импульсной характеристики при анализе систем во временной области используется также переходная характеристика (step response). Это реакция системы на входной сигнал в виде единичной ступенчатой функции u(t) при нулевых начальных условиях. Она особенно полезна при оценке переходных процессов в системе.
Связь единичной ступенчатой функции и δ – функции
 .
.
В силу принципа суперпозиции линейных систем аналогичной является связь импульсной характеристики h(t) и переходной характеристики g(t) системы
 .
.
Поэтому на практике часто
импульсную характеристику получают через переходную характеристику g(t) путем её дифференцирования. Для
реальных систем входной сигнал должен быть ограничен по амплитуде, и
поэтому проще определить g(t), чем h(t). Определяется
переходная характеристика системы путем измерения отклика на единичное входное
воздействие и затем вычисляется
производная отклика g(t).
Получаем h(t).
В Matlab для построения графиков импульсной характеристики и переходной характеристики используются функции impulse(n,d) и step(n,d), здесь n и d - коэффициенты полиномов числителя и знаменателя передаточной функции системы.
Импульсная и переходная характеристики RC – цепи первого порядка
Рассмотрим в качестве примера RC – цепь. Эта цепь часто используется на практике как простой ФНЧ, уменьшающий высокочастотные пульсации сигналов.
По закону Кирхгофа для данной цепи ![]() , при этом ток
, при этом ток
![]()

Подставляя в предыдущее выражение, получаем
![]() .
.
Решим однородное ДУ
![]()
Решение однородного уравнения отыскиваем в виде ![]() .
.
Для получения общего решения уравнения с произвольной правой
частью x(t)
будем использовать метод вариации произвольных постоянных (метод
Лагранжа). Для этого представим неопределенный коэффициент А как функцию аргумента : ![]() .
.
Подставим y(t) и производную
![]() в исходное дифференциальное уравнение:
в исходное дифференциальное уравнение:

.
Частотная характеристика
Приведем
подобные члены тогда уравнение упрощается до
 .
.
Интегрируя от t = 0 до t, получим  ,
,
здесь А(0) - произвольная постоянная интегрирования.
Тогда при подстановке A(t) общее решение уравнения
Обозначим начальное условие как ![]() , тогда
, тогда
Первое слагаемое этого выражения представляет собой вынужденную составляющую решения для заданной правой части x(t) при нулевых начальных условиях (zero state response), а второе слагаемое – решение однородного ДУ с нулевой правой частью (zero – input response, x(t)=0). Её называют также свободной составляющей.
Для нулевых начальных условий Y0 = 0 и тогда
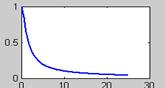
Чтобы найти импульсную характеристику цепи, положим ![]() при н.н.у. Тогда
при н.н.у. Тогда

В этом выражении интегрирование выполняется от 0- для включения
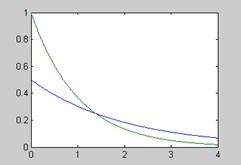
дельта - функции в область интегрирования. Таким образом, мы получили импульсную характеристику (ИХ) RC –
цепи первого порядка 
Графики ИХ цепи для RC = 1 и RC = 2
Определение ИХ в
Matlab.
Возьмем τ = RC = 2,
т.е. уравнение цепи ![]()
>> num=1;
>> den=[2, 1];
>> impulse(num,den)
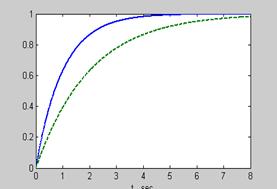
Переходная характеристика цепи (системы) – интеграл от ИХ:

Или ![]()
Графики для RC = 1 и RC = 2
Для системы первого порядка несложно и аналитически определить переходную характеристику.
Уравнение цепи ![]() . Решение однородного
уравнения
. Решение однородного
уравнения
![]() . При правой
части
. При правой
части ![]() частное решение
уравнения имеет вид
частное решение
уравнения имеет вид
![]() когда
когда ![]() . Отсюда подстановкой
частного решения
. Отсюда подстановкой
частного решения ![]() в уравнение получаем К = 1.
в уравнение получаем К = 1.
Тогда общее решение уравнения
при ![]() как сумма yc(t) и yp(t) есть
как сумма yc(t) и yp(t) есть ![]() . Используем нулевое начальное
условие
. Используем нулевое начальное
условие ![]() , т.е.
, т.е. ![]() , отсюда определяем
, отсюда определяем ![]() и решение, т.е.
переходная характеристика приобретает
вид
и решение, т.е.
переходная характеристика приобретает
вид ![]() .
.
Импульсная характеристика – это
производная от переходной характеристики, поскольку ![]() . Поэтому
. Поэтому
![]() .
.
Второй член этого выражения
представляет собой импульс. Интеграл от этого импульса  . Поэтому второй член можно не учитывать.
. Поэтому второй член можно не учитывать.
В результате импульсная характеристика (импульсный отклик) цепи
![]() .
.
Для систем более высокого порядка аналитические определения импульсной или переходной характеристик – гораздо более сложные задачи, решаемые с помощью спецальных программ, например, MATLAB.
Заключение
Для анализа и синтеза систем важнейшим является свойство линейности.
Система является линейной,
если она удовлетворяет принципу суперпозиции.
- Широкий
класс линейных непрерывных стационарных систем (ЛНСС) описывается
обыкновенными линейными дифференциальными уравнениями с постоянными
коэффициентами
 .
. - Связь выходного и входного сигналов линейных систем дает решение дифференциального уравнения, однако такое решение для системы высокого порядка (n =3,4,…) является достаточно сложной задачей.
- На
практике задача анализа ЛНСС во временной области, как правило, решается с
использованием непрерывной свертки входного
сигнала x(t) и импульсной характеристики h(t)
 .
. - Приближенное вычисление непрерывной свертки может быть произведено (в частности, в программе Matlab) по выражению
![]() , здесь Т –
интервал дискретизации.
, здесь Т –
интервал дискретизации.
· Для ограниченного числа случаев свертка может быть вычислена аналитически, а также с применением символьных преобразований в Matlab.